taosun47, segum, jpostels, yuxuwang @ethz.ch213710SHIFT: 一种用于连续多任务领域自适应的合成驾驶数据集0Luc Van Gool 1 Bernt Schiele 2Federico Tombari 3 , 4 Fisher Yu 10Tao Sun 1 � ...
”个文件的5个标签 自动驾驶感知系统 连续适应策略的研究 鲁棒性和普适性评估“ 的搜索结果

版权归作者所有。深度学习的基准不确定性估计方法与安全相关的测试Maximilian Henne,Adrian Schwaiger,Karsten ...有一些方法试图通过设计模型来解决这个问题,以便为其不确定性提供更可靠的值。然而,即使这些模型
Ang Li李彦宏,and Cong Liu<$德克萨斯大学达拉斯分校马里兰大学帕克分校University of Maryland,College Park摘要尽管深度神经网络(DNN)被广泛用于基于视觉的自动驾驶系统中,但它们被发现容易受到对抗性攻击,...
通过两个假设,一个是地平面相对于相机映射关系固定,一个是所有物体底部与地平面相接,基于一个采样策略来密集采集候选框,通过计算得到的特征,利用结构化SVM[2]学习了一个回归模型,回归出三维包围框和真实值之间...
尽管对传统计算机视觉任务的后门攻击进行了大量的研究,但其在自动驾驶场景中的实用性和适用性还很少探索,尤其是在物理世界中。本文的目标是车道检测系统,它是许多自动驾驶任务不可或缺的模块,如导航、车道切换。...
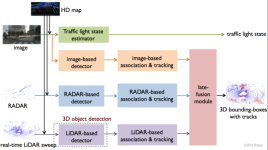
eng.ox.ac.uk摘要多传感器感知是保证自动驾驶系统可靠性和准确性的关键,而多目标跟踪(MOT)通过跟踪动态目标的连续运动来改善这一点。用于多传感器多对象跟踪的大多数当前方法中心照相机),或者通过在后处理中...

环境感知作为第一环节,处于智能驾驶车辆与外界环境信息交互的关键位置,其关键在于使智能驾驶车辆更好地模拟人类驾驶员的感知能力,从而理解自身和周边的驾驶态势。 相机、雷达、定位导航系统等为智能驾驶车辆提供...

25500研究多LiDAR布置对自动驾驶物体检测的影响0胡汉江1* 刘祖鑫1* Sharad Chitlangia2† Akhil Agnihotri3† 赵丁101 卡内基梅隆大学 2 亚马逊 3 南加州大学0{hanjianghu,zuxinl,dingzhao}@cmu.edu, ...
目前在机器视觉、智能算法、数据分析等...卷积神经网络在特征获取和分类判别上具有较好的应用效果。本章首先介绍卷积神经网络的各项组成部分,然后对YOLO算法原理进行介绍,最后对深度学习中不可或缺的数据集进行介绍。

17081杂散移位风格面向鲁棒和自适应的运动预测:因果表示观点RiccardoCadei * *Sherwin Bahmani AlexandreAlahiE'colePolytechniqueFe'de'raledeLausanne(EPFL){firstname.lastname}@ epfl.ch摘要从观测数据中学习...
7057用于随机语义分割的校准对抗性精化Elias Kassapis1,2,* Georgi Dikov2Deepak K.Gupta1CedricNugteren21荷兰阿姆斯特丹大学信息学院2TomTom,阿姆斯特丹,荷兰[email protected]摘要在语义分割任务中...
点云是三维环境感知中最重要的在这项工作中,我们利用这种径向对称性,通过分而治之的策略,以提高3D感知性能和简化优化。我们提出了方位角归一化(AziNorm),它沿径向对点云进行归一化,消除了方位角差异带来的...
自动驾驶是最近几年计算机科学和机械工程领域研究的热点之一,其目标是实现无 人驾驶车辆的自主行驶。自动驾驶目标检测技术是自动驾驶技术的重要组成部分之一,它 利用图像或传感器数据等方式来检测和识别车辆周围的...
激光雷达,英文全称为Light Detection And Ranging,简称LiDAR,即光探测与测量,是一种集激光、全球定位系统(GPS)和IMU(InertialMeasurement Unit,惯性测量设备)三种技术于一身的系统,用于获得数据并生成精确...
针对助老陪护应用场景,为了使智能机器人更好地实现交互,本文选择了语音、手势和场景对象进行融合识别。针对助老陪护的现实特点,为了达到更自然的交互效果,本文识别了老年人日常生活陪护和心理陪护游戏中的四种...

9215ImageNet的鲁棒性会转移到下游任务吗?耶鲁大学yutaro. yale.eduMayu OtaniCyberAgent,[email protected]摘要随着干净的ImageNet准确性接近其上限,研究社区越来越关注分布变化下的鲁棒准确性虽然已经...
172220从所有车辆中学习0Dian Chen Philipp Kr¨ahenb¨uhlUT Austin0摘要0在本文中,我们提出了一个系统,可以从不仅仅是自我驾驶车辆,而是所有观察到的车辆的经验中训练驾驶策略。该系统利用其他参与者的行为...
为了分割出感兴趣的目标,加快后续目标识别的速度,本章研究 了基于布料模拟和欧式聚类的点云分割方法研究,主要分为地面点云分割和非地面点云聚 类。在激光雷达获取的城市交通道路场景中,地面点云通常占据了大部分...
来源 |鲨鱼观海一篇关于自动驾驶测试的文献翻译。摘 要一般来说软件测试常常只是寻找bug,而不是通过精密的实验来保证产品质量。一个相比简单的系统级的测试,即测试—失败—补丁(改进)—测试...
4.1 YOLOv8算法原理在探讨YOLOv8算法的原理时,我们首先需要...YOLOv8作为这一系列中的最新迭代,不仅继承了前代YOLO算法的这些优点,而且在结构设计和性能上都有了显著的改进,从而进一步提升了检测的准确性和速度。

152940针对三维点云的鲁棒结构化声明性分类器:通过隐式梯度抵御对抗攻击0Kaidong Li 1 , Ziming Zhang 2* , Cuncong Zhong 1 , Guanghui Wang 301 Department of EECS, University of Kansas,...
推荐文章
- python入门(13)异常与文件_except filenotfounderror:-程序员宅基地
- Android面试攻略_详细了解在当今的社会里android工程师应具备什么的技能?并能详细说说自己的见解。-程序员宅基地
- Zendframework 1.6整合Smarty_setting private or protected class member is not a-程序员宅基地
- Qt-装饰者模式_qt装饰模式-程序员宅基地
- 新开普掌上校园服务管理平台service.action RCE漏洞复现 [附POC]-程序员宅基地
- 基于 Milvus 的音频检索系统-程序员宅基地
- 331、基于51单片机智能红外遥控暖风机温度无线蓝牙远程控制系统设计(程序+原理图+配套资料等)_红外感应暖风机自动控制系统设计-程序员宅基地
- Android自定义圆角矩形图片ImageView_android 矩形圆角imageview-程序员宅基地
- 又见回文 字符串-程序员宅基地
- switch的参数可以是什么类型?_switch的参数有哪些-程序员宅基地